Raspberry Pi Camera Module
You can use the Raspberry Pi Camera Module v1 with the
Vicharak Axon. The raspi camera module is a small circuit board
that connects to the CSI connector on the Axon and allows you to take
photos and videos.
We do not build or design the camera module, but we do test it for compatibility with our Axon. We recommend buying the original camera module from the Raspberry Pi Foundation, or from one of our authorized resellers.
You can find more information about the camera module on the Raspberry Pi Camera documentation.
Axon Camera Guide
You must require to update kernel by using below command.
sudo apt update
sudo apt upgrade
Enable overlays options sutiable for your camera.
You can setup camera using python source.
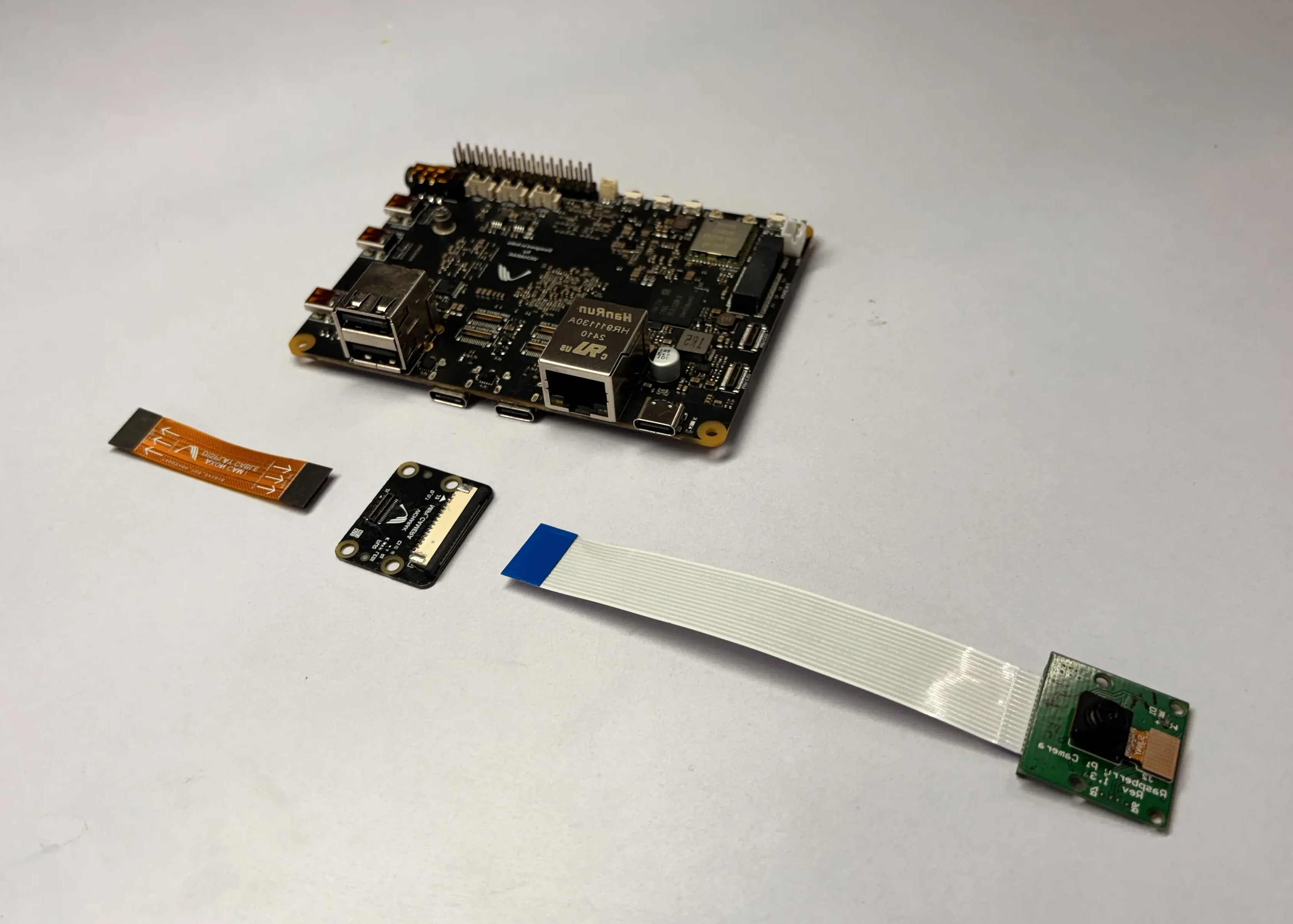
Pre-Requisites
Camera ( OV5647 )
Vicharak Flex Cable 30 Pin 0.4mm Pitch Cable (Golden Color)
Vicharak Camera PCB
FPC50 15 Pin 1mm Pitch Cable
Enable Overlays In Axon
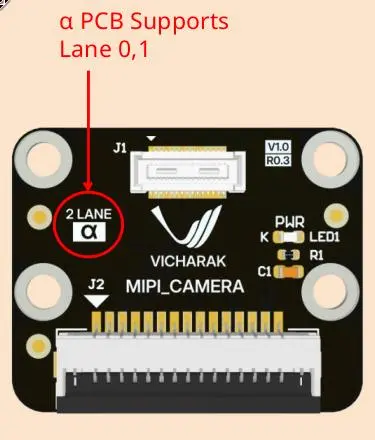
Camera Interface PCBs
2 Lane Alpha PCB ( Rpi compatible )
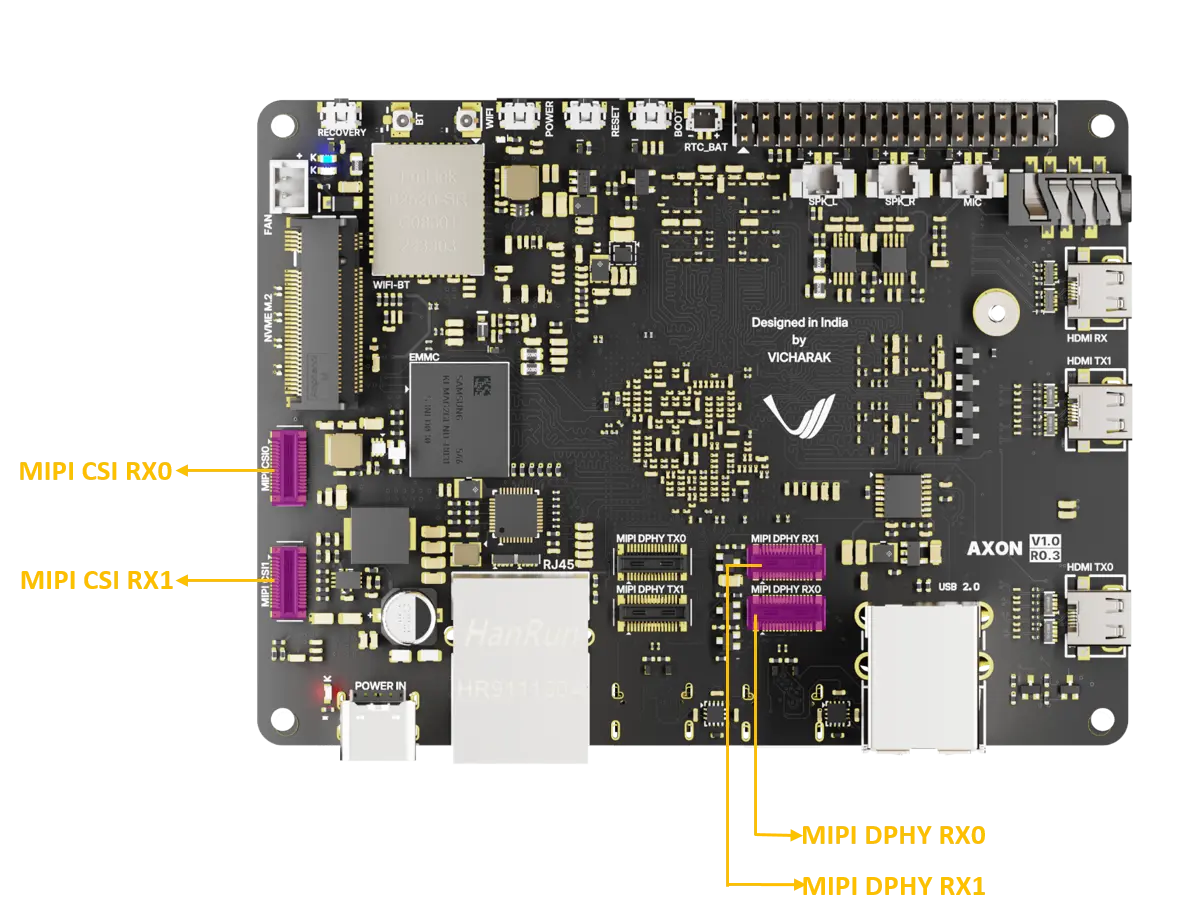
Here, you can find which overlay should be turned on for each MIPI Connector.
Interface on Vicharak board |
Lane option |
Vicharak camera PCB |
Turn on Overlay in Linux |
|---|---|---|---|
MIPI CSI0 |
2 Lane |
α |
Alpha |
MIPI CSI1 |
2 Lane |
α |
Alpha |
MIPI DPHY RX0 |
2 Lane |
α |
Alpha |
MIPI DPHY RX1 |
2 Lane |
α |
Alpha |
MIPI CSI0 MIPI CSI1 MIPI DPHY RX0 MIPI DPHY RX1 |
4 Lane |
α |
Alpha |
Note
Alpha 4 lane PCB will be available soon
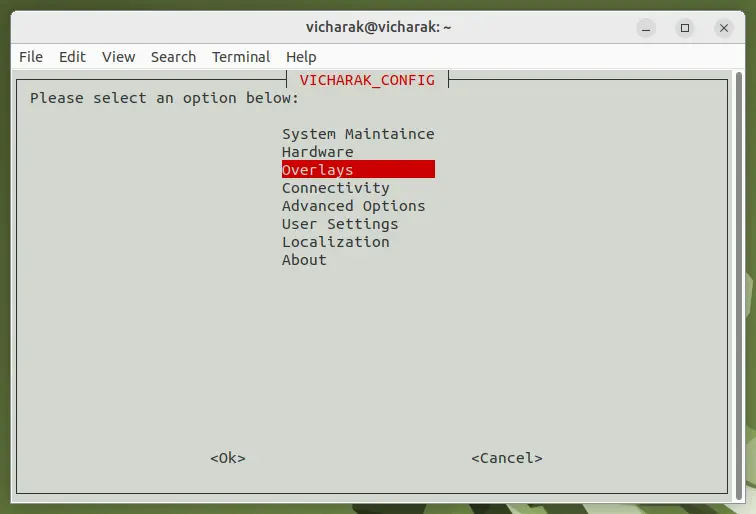
Steps to follow for Configuration
Open a terminal window(
Ctrl+Alt+T).Run command
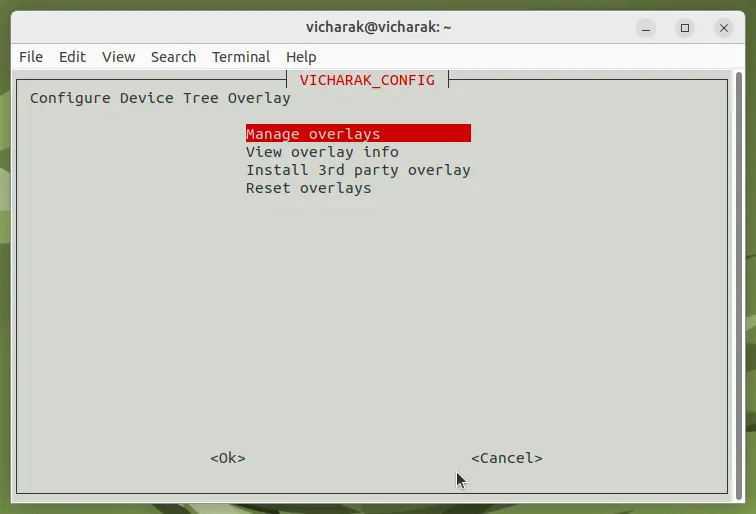
sudo vicharak-configin it.Select
Overlaysoptions in it by pressingenterkey.
You will see Warning Page, click on
yesand selectManage Overlaysoptions.
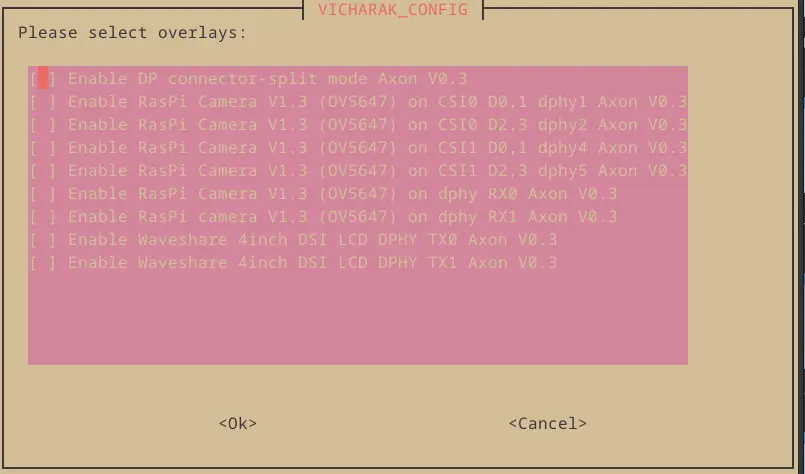
Select overlays as per your camera part number
( OV5647 )by pressingspacebaron keyboard, then selectOk.
To return back to terminal, press the
Esckey until you exit from it.In order to enable your configuration, Restart your computer or Run command
sudo rebootin terminal.
Danger
Make sure that whenever you are going to connect Camera, Device should be power off.
How to Attach Camera to Axon
First, Connect Vicharak Flex Cable To Vicharak CAM PCB Connector.
Danger
Make sure to connect the Vicharak flex cable’s AXON PCB side connector to the AXON board, and the display/camera side connector to the Vicharak CAM PCB.

Attach Camera Module To FPC50 15 Pin 1mm Pitch Cable.
Connect Camera To Vicharak CAM PCB Connector.
Connect Axon Side Vicharak Flex Cable to Axon.
After Using Camera, User can remove camera using twizer.
For Single Camera
Run Camera Using V4l2 Utility
Use v4l2-ctl to capture camera frame data
v4l2-ctl --verbose -d /dev/video<camera_device_number> --set-fmt-video=width=1920,height=1080,pixelformat='NV12' --stream-mmap=4 --set-selection=target=crop,flags=0,top=0,left=0,width=1920,height=1080 --stream-to=sample.yuv
Note
For Single Camera, Default Camera Number would be 11. As you can verfiy by below process.
You can get <camera_device> Number by running below command :
ls -l /dev/video*
=> /dev/video-camera0 -> video<camera_device> e.g. - 11, 31 etc.
Playing Captured File
ffplay -f rawvideo -video_size 1920x1080 -pix_fmt nv12 sample.yuv
Note
If you don’t have v4l2-ctl, then it can be installed by below command:
sudo apt update
sudo apt install v4l2-ctl
Run Camera Using Python Script
Install Python if not already installed. You can download Python from the official website: Python Downloads.
for Debian-based systems (like Ubuntu):
sudo apt update
sudo apt install python3-pip
Install the OpenCV library using pip
for Debian-based systems (like Ubuntu):
pip install opencv-python
Setup
Open a terminal window(
Ctrl+Alt+T).To create a (
.py) file in vim editor, Run commandvim <file_name>.pyin terminal.Copy this below content into the file and paste it by pressing
Ctrl + Shift + v, then pressEscand to save this file, type:wq.
# !/bin/env python3
import cv2
cap = cv2.VideoCapture(<camera_device_number>)
while True:
ret, frame = cap.read()
cv2.imshow('frame', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# After the loop release the cap object
cap.release()
# Destroy all the windows
cv2.destroyAllWindows()
Note
For Single Camera, Default Camera Number would be 11. As you can verfiy by below process.
You can get <camera_device> Number by running below command :
ls -l /dev/video*
=> /dev/video-camera0 -> video<camera_device> e.g. - 11, 31 etc.
Open a terminal window(
Ctrl+Alt+T).Navigate to the directory where your Python program is located using the
cdcommand.Run Python program using the following command:
python3 <file_name>.py
If you have multiple versions of Python installed, ensure you use python3 to run the program for Python 3.x.
Troubleshooting
If you encounter any errors related to missing modules or libraries, ensure that Python and OpenCV are properly installed on your system.
If the camera frame does not open or the program does not behave as expected, check for any errors in the terminal output and review your program for potential issues.
Check Camera I2C address is detected or not.
Note
sudo i2cdetect -y <i2c_bus_number>
I2C Bus number is mentioned in Camera DTS node in device tree file